
本文最后更新于350 天前,其中的信息可能已经过时,如有错误请发送邮件到273925452@qq.com
查找开发板PWM引脚
原理图搜PWM,或者用配置工具
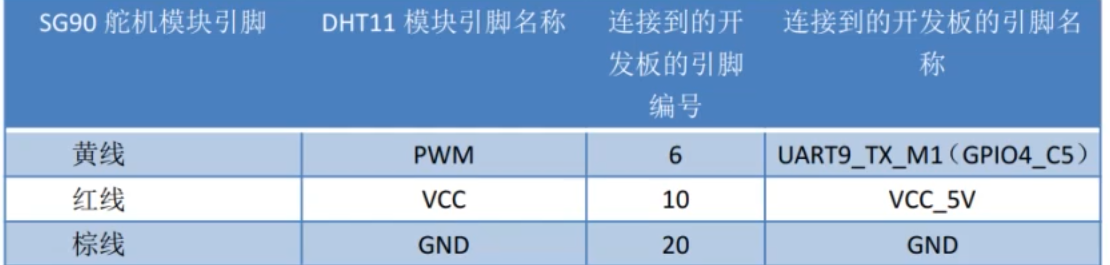
硬件连接
SG90使用方法
20ms周期的PWM信号,高电平持续时间一般为0.5ms到2.5ms范围内对角度进行控制。以180°SG90为例:
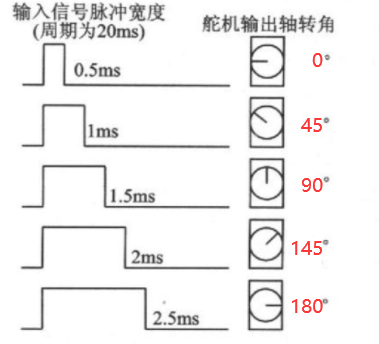
0.5ms->0度
1.0ms->45
1.5ms->90
2.0ms->135
2.5ms->180
修改设备树
查看单板dtsi里的PWM
imx6ull.dtsi 文件中已经帮我们定义好了一些pwm的设备树节点,这里以pwm7为例
pwm2: pwm@02084000 {
compatible = "fsl,imx6ul-pwm", "fsl,imx27-pwm";
reg = <0x02084000 0x4000>;
interrupts = <GIC_SPI 116 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&clks IMX6UL_CLK_PWM2>,
<&clks IMX6UL_CLK_PWM2>;
clock-names = "ipg", "per";
#pwm-cells = <2>;
status = "disabled"; //改为okay
};Code language: PHP (php)添加pinctrl节点:我们要在设备树(.dts)文件中引用和使能该节点,同时指定好pwm映射到的GPIO引脚(即pinctrl子系统,我这里映射到了GPIO4_19上)
&iomuxc {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_hog_1>;
imx6ul-evk {
......
......
/* SG90 PWM7 GPIO4_IO19 */
pinctrl_pwm7: pwm7grp { /*!< Function assigned for the core: Cortex-A7[ca7] */
fsl,pins = <
MX6UL_PAD_CSI_VSYNC__PWM7_OUT 0x000010B0
>;
};
......
......
}
......
......
&pwm7 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_pwm7>;
clocks = <&clks IMX6UL_CLK_PWM7>,
<&clks IMX6UL_CLK_PWM7>;
status = "okay";
};Code language: JavaScript (javascript)根节点
sg90 {
compatible = "fire,sg90";
pwms = <&pwm7 0 20000000>; /* 使用pwm7 id为0 周期为20000000ns = 20ms */
status = "okay";
};Code language: JavaScript (javascript)使用sysfs操作PWM
进入pwm路径,例如
cd /sys/class/pwm
ls
cat /sys/kernel/debug/pwm
查看dtsi对应PWM的地址是否匹配Code language: JavaScript (javascript)进入对应chip
cd /sys/class/pwm/pwmchip7Code language: JavaScript (javascript)导出
echo 0 > export
ls
cd pwm0/
lsCode language: JavaScript (javascript)设置频率,周期echo 20000000 > periodCode language: PHP (php)设置角度(高电平时间)
echo 2000000 > duty_cycle
echo 500000 > duty_cycleCode language: PHP (php)设置极性
echo normal > polarityCode language: PHP (php)echo inversed > polarityCode language: PHP (php)使能
echo 1 > enable
echo 0 > enableCode language: PHP (php)编写字符设备驱动
程序
sg90_drv.c
#include <linux/module.h>
#include <linux/poll.h>
#include "linux/jiffies.h"
#include <linux/delay.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
#include <linux/fcntl.h>
#include <linux/timer.h>
#include <linux/of.h>
#include <linux/gpio.h>
#include <linux/kthread.h>
#include <linux/pwm.h>
#include <linux/uaccess.h>
/* 主设备号 */
static int major = 0;
static struct class *sg90_class; // 设备类
static struct pwm_device *sg90_pwm_device; // PWM结构体操作指针
static ssize_t sg90_open(struct inode *inode, struct file *file )
{
printk("====%s====\n", __FUNCTION__);
pwm_config(sg90_pwm_device, 500000, 20000000); // 设置PWM参数,初始角度,频率,单位ns
pwm_set_polarity(sg90_pwm_device, PWM_POLARITY_NORMAL); // 设置PWM极性
pwm_enable(sg90_pwm_device);
return 0;
}
static ssize_t sg90_read(struct file *file, char __user *buf, size_t size, loff_t *offset)
{
printk("====%s====\n", __FUNCTION__);
return 0;
}
static ssize_t sg90_write(struct file *filp, const char __user *buf, size_t size, loff_t *offset)
{
int ret;
unsigned char data[1];
printk("====%s====\n", __FUNCTION__);
ret = copy_from_user(data, buf, size);
pwm_config(sg90_pwm_device, 500000+data[0] * 100000/9, 20000000);
return 0;
}
static int sg90_release(struct inode *node, struct file *filp)
{
printk("====%s====\n", __FUNCTION__);
// pwm_config(sg90_pwm_device, 500000, 20000000);
pwm_free(sg90_pwm_device);
return 0;
}
/* 定义自己的file_operations结构体 */
static struct file_operations sg90_drv = {
.owner = THIS_MODULE,
.open = sg90_open,
.read = sg90_read,
.write = sg90_write,
.release = sg90_release,
};
static int sg90_probe(struct platform_device *pdev)
{
printk("====%s====\n", __FUNCTION__);
/* 注册file_operations */
major = register_chrdev(0, "sg90_chrdev", &sg90_drv); /* /dev/gpio_desc */
sg90_class = class_create(THIS_MODULE, "sg90_class");
device_create(sg90_class, NULL, MKDEV(major, 0), NULL, "sg90"); /* /dev/sg90 */
/* 从设备树获得硬件信息 */
sg90_pwm_device = devm_of_pwm_get(&pdev->dev, pdev->dev.of_node, NULL);
if (IS_ERR(sg90_pwm_device))
{
dev_err(&pdev->dev, "Failed to get PWM for sg90\n");
return PTR_ERR(sg90_pwm_device);
}
dev_info(&pdev->dev, "=======sg90 initialized successfully=====\n");
return 0;
}
static int sg90_remove(struct platform_device *pdev)
{
printk("======%s=======\n", __FUNCTION__);
device_destroy(sg90_class, MKDEV(major, 0));
class_destroy(sg90_class);
unregister_chrdev(major, "sg90_chrdev");
return 0;
}
/* 定义设备树匹配表,用于识别和支持特定的字符设备驱动器 */
static const struct of_device_id sg90_match_table[] = {
/* 匹配字符串 "fire,xxx" 用于标识 */
{.compatible = "fire,sg90"},
/* 空项作为匹配表的结束标志 */
{},
};
/* 定义platform_driver */
static struct platform_driver sg90_driver = {
/* 设置<驱动程序的名称>和<设备树匹配表> */
.driver = {
.name = "sg90", // 字符设备名
.of_match_table = sg90_match_table, // 设置设备树匹配表,用于设备的匹配
},
.probe = sg90_probe, // 设置探测函数,当设备被探测到时调用
.remove = sg90_remove, // 设置移除函数,当设备被移除时调用
};
/* 在入口函数 */
static int __init sg90_platform_driver_init(void)
{
int ret = 0;
printk("====%s====\n", __FUNCTION__);
ret = platform_driver_register(&sg90_driver); // 注册驱动程序
return ret;
}
/* 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数
*/
static void __exit sg90_platform_driver_exit(void)
{
printk("====%s====\n", __FUNCTION__);
platform_driver_unregister(&sg90_driver); // 销毁设备信息
}
/* 7. 其他完善:提供设备信息,自动创建设备节点 */
module_init(sg90_platform_driver_init);
module_exit(sg90_platform_driver_exit);
MODULE_LICENSE("GPL");
Code language: HTML, XML (xml)sg90_test.c
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
#include <poll.h>
#include <signal.h>
#include <stdlib.h>
/*
* ./sg90_test /dev/sg90 90
*
*/
int main(int argc, char **argv)
{
int fd;
unsigned char buf[1];
/* 1. 判断参数 */
if (argc != 3)
{
printf("Usage: %s /dev/xxx\n", argv[0]);
return -1;
}
/* 2. 打开文件 */
fd = open(argv[1], O_RDWR);
if (fd < 0)
{
printf("can not open file %s\n", argv[1]);
return -1;
}
buf[0] = atoi(argv[2]);
write(fd, buf, 1);
sleep(3);
close(fd);
return 0;
}
Code language: PHP (php)Makefile
# 1. 使用不同的开发板内核时, 一定要修改KERN_DIR
# 2. KERN_DIR中的内核要事先配置、编译, 为了能编译内核, 要先设置下列环境变量:
# 2.1 ARCH, 比如: export ARCH=arm64
# 2.2 CROSS_COMPILE, 比如: export CROSS_COMPILE=aarch64-linux-gnu-
# 2.3 PATH, 比如: export PATH=$PATH:/home/book/100ask_roc-rk3399-pc/ToolChain-6.3.1/gcc-linaro-6.3.1-2017.05-x86_64_aarch64-linux-gnu/bin
# 注意: 不同的开发板不同的编译器上述3个环境变量不一定相同,
# 请参考各开发板的高级用户使用手册
KERN_DIR = /home/book/100ask_imx6ull-sdk/Linux-4.9.88 # 板子所用内核源码的目录
all:
make -C $(KERN_DIR) M=`pwd` modules
$(CROSS_COMPILE)gcc -o sg90_test sg90_test.c
clean:
make -C $(KERN_DIR) M=`pwd` modules clean
rm -rf modules.order sg90_test
# 参考内核源码drivers/char/ipmi/Makefile
# 要想把a.c, b.c编译成ab.ko, 可以这样指定:
# ab-y := a.o b.o
# obj-m += ab.o
obj-m += sg90_drv.o
Code language: PHP (php)上机验证成功









评论