
文章目录[隐藏]

内核版本Linux-4.9.88

概述
简介:
人体都有恒定的体温,一般在 37 度,所以会发出特定波长 10uM 左右的红外线,被动式红外探头就是靠探测人体发射的 10uM 左右的红外线而进行工作的。人体发射的 10uM 左右的红外线通过菲泥尔滤光片增强后聚集到红外感应源上。红外感应源通常采用热释电元件,这种元件在接收到人体红外辐射温度发生变化时就会失去电荷平衡,向外释放电荷,后续电路经检测处理后就能产生报警信号。
人体红外模块是一种能够检测人或动物发射的红外线而输出电信号的传感器。广泛应用于各种自动化控制装置中。比如常见的楼道自动开关、防盗报警等。如果有人在量程内运动,DO 引脚将会输出有效信号。
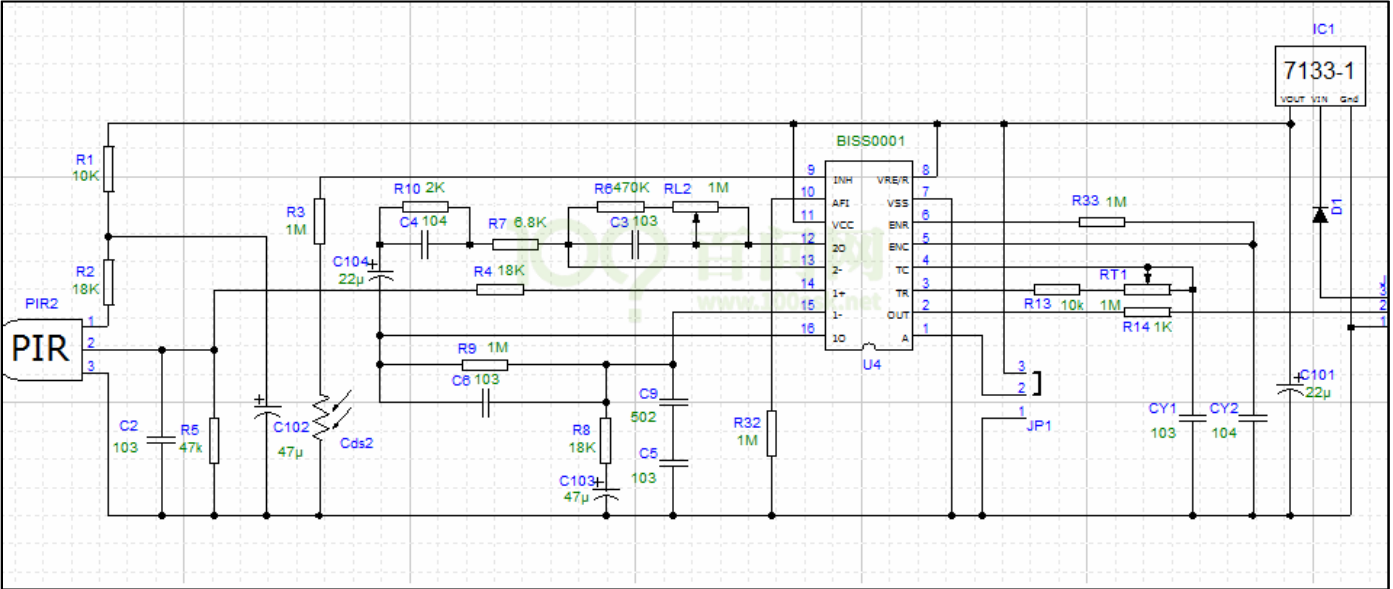
市面上人体红外模块有很多,但其外形和原理都差不多,如下是一个典型的人体红外模式原理图:
实物和使用方法:
如下图所示,可以设置探测距离、延迟控制等:
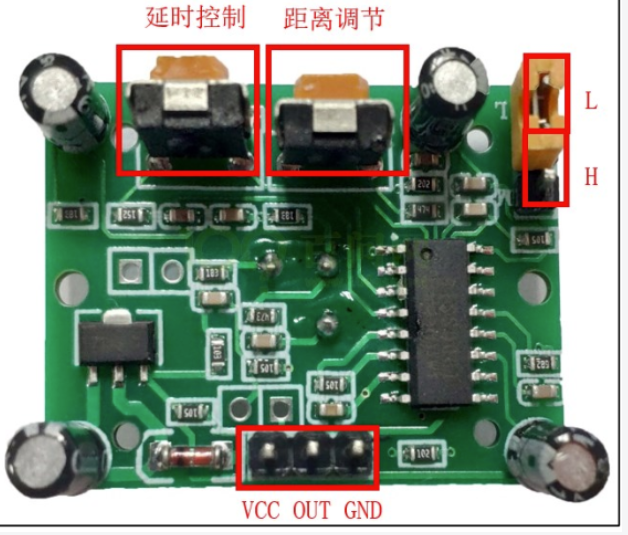
通过跳线来设置是否可以重复触发,默认为 L。其中 L 表示不可重复,H 表示可重复。含义如下:
① 不可重复触发方式:
感应到人体并输出高电平后,延时时间一结束,输出将自动从高电平变为低电平。
② 重复触发方式:
感应到人体后输出高电平后,在延时时间段内,如果有人体在其感应范围内活动,其输出将一直保持高电平,直到人离开后才延时将高电平变为低电平(感应模块检测到人体的每一次活动后会自动顺延一个延时时间段,并且以最后一次活动的时间为延时时间的起始点)。
可以通过电位器实现封锁时间和检测距离的调节:
① 调节检测距离:
即有效距离的远近。调节距离电位器顺时针旋转,感应距离增大(约 7 米);反之,感应距离减小(约 3 米)。
② 封锁时间:
感应模块在每一次感应输出后(高电平变为低电平),可以紧跟着设置一个封锁时间,在此时间段内感应器不接收任何感应信号。
此功能可以实现(感应输出时间和封锁时间)两者的间隔工作,可应用于间隔探测产品;同时此功能可有效抑制负载切换过程中产生的各种干扰。
调节延时电位器顺时针旋转,感应延时加长(约 300S),反之,感应延时减短(约 0.5S)。
程序
涉及重要知识点:
– GPIO设备结构体– GPIO中断
– 环形缓冲区
gpio_drv.c
#include <linux/module.h>
#include <linux/poll.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
#include <linux/fcntl.h>
#include <linux/timer.h>
struct gpio_desc{
int gpio;
int irq;
char *name;
int sr501;
struct timer_list sr501_timer;
} ;
static struct gpio_desc gpios[1] = {
{115, 0, "sr501", }, //GPIO4_19 : 3*32+19=115
};
/* 主设备号 */
static int major = 0;
static struct class *gpio_class;
/* 环形缓冲区 */
#define BUF_LEN 128
static int g_sr501[BUF_LEN];
static int r, w; //缓冲区读和写的索引
struct fasync_struct *sr501_fasync;
#define NEXT_POS(x) ((x+1) % BUF_LEN)
/* 缓冲区是否为空 */
static int is_sr501_buf_empty(void)
{
return (r == w);
}
/* 缓冲区是否为满 */
static int is_sr501_buf_full(void)
{
return (r == NEXT_POS(w));
}
/* 向缓冲区放入数据 */
static void put_sr501(int sr501_val)
{
if (!is_sr501_buf_full()) /* 缓冲区没有满 */
{
g_sr501[w] = sr501_val; // key放入缓冲区
w = NEXT_POS(w); //更新写索引
}
}
/* 从缓冲区取出数据 */
static int get_sr501(void)
{
int sr501_val = 0;
if (!is_sr501_buf_empty()) // 缓冲区数据不为空
{
sr501_val = g_sr501[r]; // 取出缓冲区数据
r = NEXT_POS(r); //更新读索引
}
return sr501_val;
}
/* 创建等待队列gpio_wait */
static DECLARE_WAIT_QUEUE_HEAD(gpio_wait);
/* 实现对应的open/read/write等函数,填入file_operations结构体 */
static ssize_t gpio_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{
//printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
int err;
int sr501_val; // int类型占用4字节
/* 缓冲区数据为空 且 为非阻塞模式 -> 返回错误码*/
if (is_sr501_buf_empty() && (file->f_flags & O_NONBLOCK))
return -EAGAIN;
/* 阻塞等待缓冲区数据非空 */
wait_event_interruptible(gpio_wait, !is_sr501_buf_empty());
/* 从缓冲区取出数据 */
sr501_val = get_sr501();
/* 把数据拷贝到用户空间 */
err = copy_to_user(buf, &sr501_val, sizeof(sr501_val));
return 4;
}
/* 轮询 */
static unsigned int gpio_drv_poll(struct file *fp, poll_table * wait)
{
/* 1.函数会不断检查GPIO端口的状态,如果状态满足等待条件,则结束等待
2.如果等待时间超过指定时间,则返回超时错误。
wait:等待时间
*/
poll_wait(fp, &gpio_wait, wait);
return is_sr501_buf_empty() ? 0 : POLLIN | POLLRDNORM;
}
/* 异步通知 */
static int gpio_drv_fasync(int fd, struct file *file, int on)
{
/* 该函数用于注册或取消注册异步通知。如果注册成功,则返回0;否则返回-EIO。*/
if (fasync_helper(fd, file, on, &sr501_fasync) >= 0)
return 0;
else
return -EIO;
}
/* 定义自己的file_operations结构体 */
static struct file_operations gpio_sr501_drv = {
.owner = THIS_MODULE,
.read = gpio_drv_read,
.poll = gpio_drv_poll,
.fasync = gpio_drv_fasync, // 异步通知
};
/**
* gpio_sr501_isr - GPIO r501中断服务程序
* @irq: 中断号
* @dev_id: 设备标识,这里指向结构体gpio_desc
*
* 该函数处理GPIO下的sr501中断事件。当sr501触发中断时,此函数将被调用。
* 它通过读取GPIO值来确定sr501的数值,并将sr501事件传递给环形缓冲区。
* 同时,它还会唤醒任何在等待这个事件的进程,并处理异步I/O的请求。
*
* 返回值: IRQ_HANDLED 表示中断已成功处理。
*/
static irqreturn_t gpio_sr501_isr(int irq, void *dev_id)
{
// 通过dev_id获取GPIO描述符
struct gpio_desc *gpio_desc = dev_id;
int val;
int sr501;
// 打印中断发生的GPIO编号
printk("gpio_sr501_isr %d irq happened\n", gpio_desc->gpio);
// 读取GPIO的当前值
val = gpio_get_value(gpio_desc->gpio);
// 根据GPIO值和sr501映射关系构造值
sr501 = (gpio_desc->sr501) | (val << 8);
put_sr501(sr501); // 将sr501值放入环形缓冲区
/* ------通知用户空间的进程有关设备状态的变化------*/
// 唤醒任何在gpio_wait上等待的进程
wake_up_interruptible(&gpio_wait);
// 发送SIGIO信号给sr501_fasync队列,通知有异步事件发生
kill_fasync(&sr501_fasync, SIGIO, POLL_IN);
// 返回IRQ_HANDLED,表示中断已处理
return IRQ_HANDLED;
}
/* 在入口函数 */
static int __init gpio_drv_init(void)
{
int err;
int i;
int count = sizeof(gpios)/sizeof(gpios[0]); //获取数组长度
// printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
for (i = 0; i < count; i++)
{
gpios[i].irq = gpio_to_irq(gpios[i].gpio); // 遍历gpios数组,为每个GPIO设置中断号。
/* 注册中断处理程序 */
err = request_irq(gpios[i].irq, gpio_sr501_isr, IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING, gpios[i].name, &gpios[i]);
}
/* 注册file_operations */
major = register_chrdev(0, "100ask_gpio_sr501", &gpio_sr501_drv); /* /dev/gpio_desc */
gpio_class = class_create(THIS_MODULE, "100ask_gpio_sr501_class");
if (IS_ERR(gpio_class)) {
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
unregister_chrdev(major, "100ask_gpio_sr501");
return PTR_ERR(gpio_class);
}
device_create(gpio_class, NULL, MKDEV(major, 0), NULL, "sr501"); /* /dev/sr501 */
return err;
}
/* 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数
*/
static void __exit gpio_drv_exit(void)
{
int i;
int count = sizeof(gpios)/sizeof(gpios[0]);
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
device_destroy(gpio_class, MKDEV(major, 0));
class_destroy(gpio_class);
unregister_chrdev(major, "100ask_gpio_sr501");
for (i = 0; i < count; i++)
{
free_irq(gpios[i].irq, &gpios[i]);
}
}
/* 7. 其他完善:提供设备信息,自动创建设备节点 */
module_init(gpio_drv_init);
module_exit(gpio_drv_exit);
MODULE_LICENSE("GPL");
sr501_test.c
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
#include <poll.h>
#include <signal.h>
static int fd;
/*
* ./SR501_test /dev/sr501
*
*/
int main(int argc, char **argv)
{
int val;
int flags;
/* 1. 判断参数 */
if (argc != 2)
{
printf("Usage: %s <dev>\n", argv[0]);
return -1;
}
/* 2. 打开文件 */
fd = open(argv[1], O_RDWR);
if (fd == -1)
{
printf("can not open file %s\n", argv[1]);
return -1;
}
while(1)
{
if (read(fd, &val, 4) == 4)
printf("get sr501: 0x%x\n", val);
else
printf("get sr501: -1\n");
}
/*如果发生意外,就阻塞程序*/
/*获取文件描述符 fd 当前的打开方式,并将结果保存在变量 flags 中。
*/
flags = fcntl(fd, F_GETFL);
/* 设置文件描述符 fd 的打开方式
flags & ~O_NONBLOCK: 将 flags 中的非阻塞模式标志位清除,即关闭非阻塞模式
*/
fcntl(fd, F_SETFL, flags & ~O_NONBLOCK);
close(fd);
return 0;
}
Code language: PHP (php)Makefile
# 1. 使用不同的开发板内核时, 一定要修改KERN_DIR
# 2. KERN_DIR中的内核要事先配置、编译, 为了能编译内核, 要先设置下列环境变量:
# 2.1 ARCH, 比如: export ARCH=arm64
# 2.2 CROSS_COMPILE, 比如: export CROSS_COMPILE=aarch64-linux-gnu-
# 2.3 PATH, 比如: export PATH=<span class="katex math inline">PATH:/home/book/100ask_roc-rk3399-pc/ToolChain-6.3.1/gcc-linaro-6.3.1-2017.05-x86_64_aarch64-linux-gnu/bin
# 注意: 不同的开发板不同的编译器上述3个环境变量不一定相同,
# 请参考各开发板的高级用户使用手册
KERN_DIR = /home/book/100ask_imx6ull-sdk/Linux-4.9.88 # 板子所用内核源码的目录
all:
make -C</span>(KERN_DIR) M=`pwd` modules
<span class="katex math inline">(CROSS_COMPILE)gcc -o sr501_test sr501_test.c
clean:
make -C</span>(KERN_DIR) M=`pwd` modules clean
rm -rf modules.order sr501_test
# 参考内核源码drivers/char/ipmi/Makefile
# 要想把a.c, b.c编译成ab.ko, 可以这样指定:
# ab-y := a.o b.o
# obj-m += ab.o
obj-m += gpio_drv.o
Code language: HTML, XML (xml)上机测试
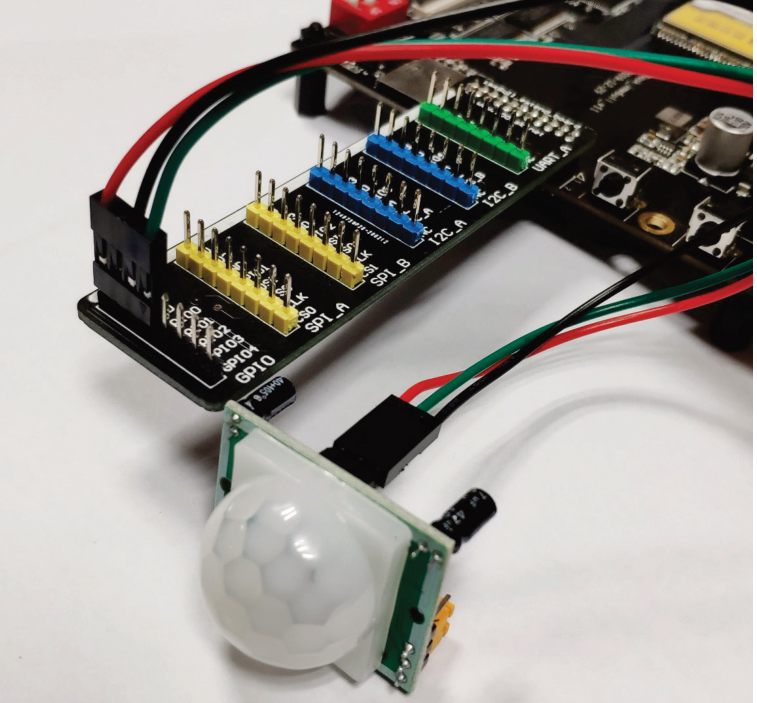
IMX6ULL 先断电,按下图所示,将模块插在扩展板的 GPIO0,将扩展板插在底板上。
注意:为了防止用户接错方向,模块和扩展板都有一条长白线,连接时需要模块上的白线和扩展板的白线在同一侧。
注意:注意 SR501 模块中红线、黑线、绿线的位置,如下图接线。
1.上传文件到开发板;
2. 装载驱动: insmod gpio_drv.ko
3.执行程序: ./SR501_test /dev/sr501
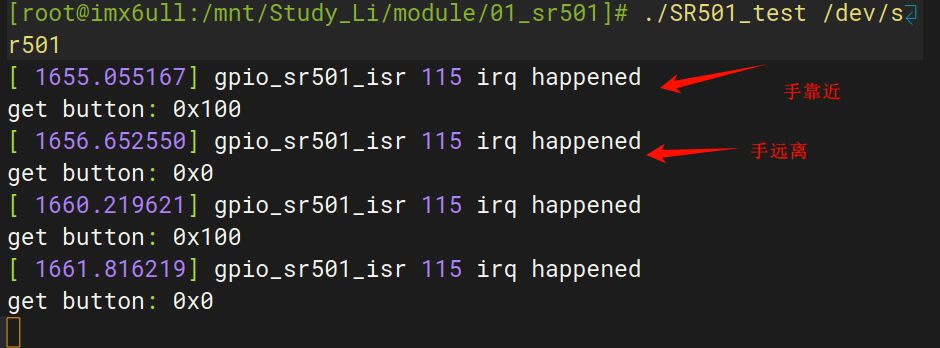
可以看到,当有人经过的时候,串口会打印信息并且 LED 灯会熄灭。当人走后,过一段时间(即设置的延迟时间)之后,就会发现 LED 灯熄灭并且串口有打印信息。具体打印店信息如上图所示(由于人体红外模块灵敏度设置的不同,观察到实际现象可能需要间隔一定时间,请根据具体来进行实验。建议先把延时时间逆
时针选择改到最低,以方便测试).
了解 Heiweilu的小世界 的更多信息
订阅后即可通过电子邮件收到最新文章。









评论